
Controlo da Solução para Análise Não-Linear no Software CSI
Ao aventurar-se no mundo da análise não-linear em programas como o SAP2000, ETABS e CSiBridge, está a solicitar ao software que resolva um problema muito mais complexo do que uma análise linear simples. O comportamento da estrutura altera-se à medida que as cargas são aplicadas. A caixa de diálogo "Nonlinear Parameters (Solution Control)" é o seu centro de comando para orientar o software sobre como resolver este problema, especialmente quando a análise é exigente e tem dificuldade em encontrar uma solução (convergir).
Este guia simplifica estas definições avançadas para o ajudar a otimizar os seus cálculos e a alcançar a convergência.
Como Aceder ao menu Solution Control
- Aceda ao menu Define e selecione Load Cases.
- Crie um novo caso de carga (load case) ou modifique um existente.
- No formulário Load Case Data, defina o Analysis Type como Nonlinear ou Nonlinear Staged Construction. Para análises dinâmicas no domínio do tempo (time-history), escolha Nonlinear como o tipo e Direct Integration ou Modal como o subtipo.
- Clique no botão Nonlinear Parameters para abrir as definições de Solution Control.
O Conceito Central: Solution Scheme
A escolha mais crítica que fará é o Solution Scheme. Este determina a estratégia fundamental que o solver utiliza. As opções variam ligeiramente dependendo se está a executar uma análise estática ou dinâmica (time-history).
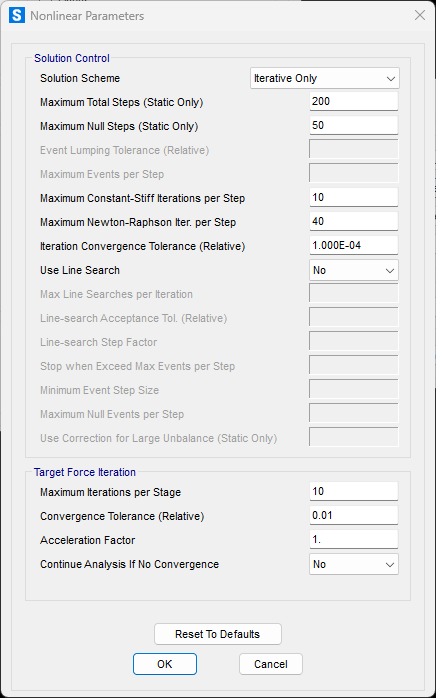
- Iterative Only: Esta é a abordagem mais direta. O solver aplica uma porção da carga e depois itera — repetindo cálculos — até que as forças na estrutura estejam equilibradas. Prioriza a precisão, garantindo que o equilíbrio é satisfeito no final de cada step.
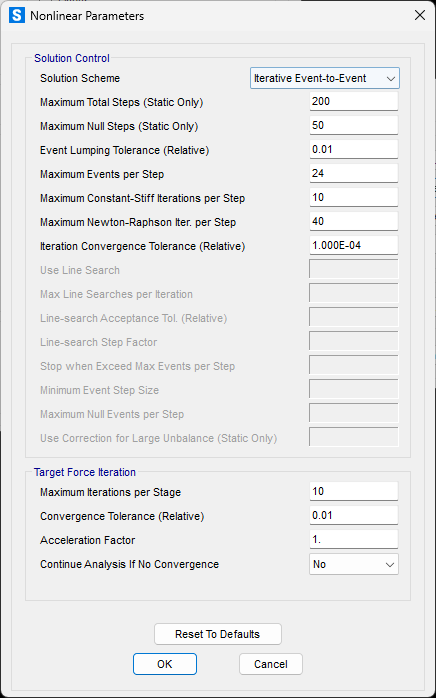
- Iterative Event-to-Event: Esta é uma abordagem híbrida. Utiliza um escalonamento Evento-a-Evento para subdividir os steps de carga onde a rigidez muda significativamente, mas também realiza iterações no final de cada step para garantir que o equilíbrio é alcançado. Isto proporciona uma boa relação entre a velocidade do escalonamento por eventos e a precisão da iteração.
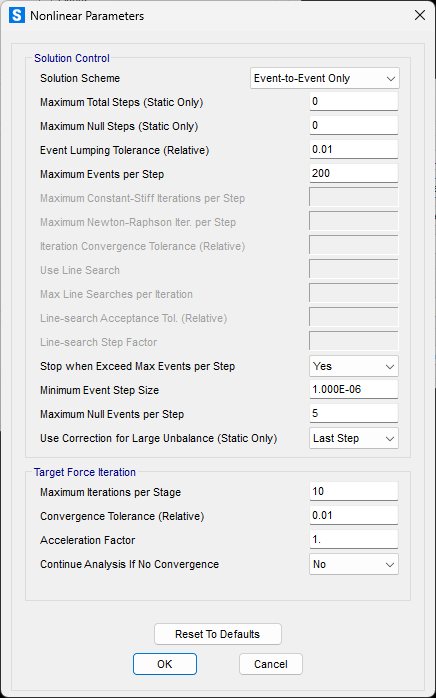
- Event-to-Event Only: Este esquema foca-se na velocidade e na superação de dificuldades de convergência. O solver não itera para verificar o equilíbrio. Em vez disso, calcula com precisão a carga necessária para causar o próximo "evento" (como a plastificação de uma rótula ou o alíviar de um cabo) e avança diretamente para esse ponto.
- Vantagem: É rápido e consegue frequentemente completar uma análise que de outra forma não convergia facilmente.
- Atenção: Como o equilíbrio não é verificado explicitamente em cada step, deve rever cuidadosamente os resultados para garantir que o erro de equilíbrio é aceitavelmente pequeno.
Parâmetros Essenciais para Todas as Análises Não-Lineares
Embora alguns parâmetros sejam específicos do tipo de análise, alguns parâmetros gerais são importantes de compreender.
- Maximum Total Steps: Este é um controlo de segurança que limita o número total de steps (tanto os guardados como os intermédios) que a análise irá executar. Se a sua análise parar antes de atingir a carga final, é provável que tenha atingido o limite. Solução: Execute novamente a análise com um valor mais elevado. Comece com um número menor para avaliar o tempo de análise.
- Maximum Null Steps: Os steps nulos são steps de "progresso zero" que ocorrem quando o solver está com dificuldades, como quando uma rótula descarrega ou as iterações não convergem. Um número excessivo de steps nulos indica que a solução pode estar bloqueada devido a instabilidade ou sensibilidade numérica. Este parâmetro permite terminar antecipadamente uma análise que está a falhar, em vez de a deixar a correr indefinidamente. Para desativar esta verificação, pode defini-lo como igual ao Maximum Total Steps.
Parâmetros para Análise Estática Não-Linear e Construção por Fases (Staged-Construction)
Além do Solution Scheme, uma opção fundamental é:
- Use Line Search: Quando definido como 'Yes' para esquemas iterativos, este algoritmo ajuda a encontrar uma solução melhor de forma mais eficiente durante as iterações. Esta opção escala o incremento da solução de uma forma tentativa-e-erro para reduzir o desequilíbrio de forças (force unbalance). Isto pode levar a uma melhor convergência com menos iterações no total, embora cada iteração demore um pouco mais. Note que não é utilizado para esquemas Event-to-Event.
Parâmetros para Análise Dinâmica Não-Linear por Integração Direta (Nonlinear Direct-Integration Time-History)
A precisão dos métodos de integração direta é muito sensível à variável time step de integração, especialmente para respostas rígidas (de alta frequência). Tente diminuir o tamanho máximo do substep até obter resultados consistentes. Mantenha o output time step fixo para evitar armazenar quantidades excessivas de dados.
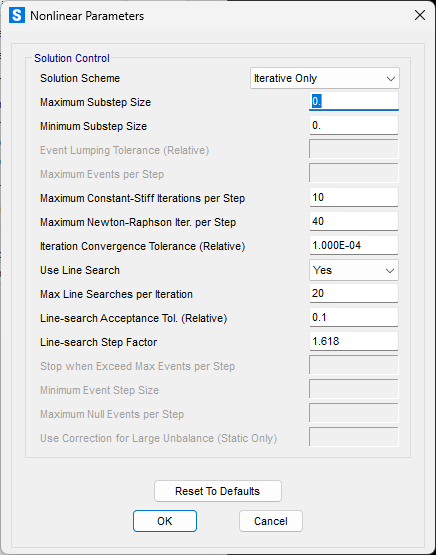
A análise parará sempre em cada output time step e em cada time step onde uma das funções de input da análise dinâmica (time-history) está definida. Adicionalmente, pode ser definido um limite superior para o step size usado na integração. Por exemplo, suponha que o output time step size era 0,005 e que as funções de input também estavam definidas a cada 0,005 segundos. Se o Maximum Substep Size for definido como 0,001, o programa realizará internamente cinco substeps de integração para cada output time step guardado. O programa pode usar substeps ainda menores, se necessário, para alcançar a convergência durante a iteração.
Nota: O valor por defeito de zero significa que não há limite, ou seja, usa o output time-step size.
Parâmetros para Análise Dinâmica Modal Não-Linear (FNA - Fast Nonlinear Analysis)
A análise modal é geralmente menos sensível ao step size do que a integração direta. A principal razão para limitar o tamanho máximo do substep é para comparação com outras análises que usaram tais limites.
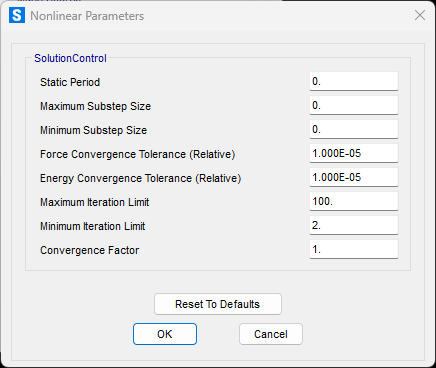
- Static Period: Normalmente, todos os modos são tratados como dinâmicos. Opcionalmente, este parâmetro pode ser usado para especificar que os modos de alta frequência (período curto) sejam tratados como estáticos, para que sigam a carga sem qualquer resposta transitória. Isto pode ser útil para certas análises quase-estáticas. No entanto, a iteração é geralmente mais estável se os efeitos dinâmicos forem incluídos.
- Force and Energy Convergence Tolerance: Estes valores definem "quão perto é suficientemente perto" para o solver. A Force Tolerance compara o erro de força com as forças totais na estrutura. A Energy Tolerance é uma verificação secundária para limitar a quantidade de não-linearidade permitida dentro de um único substep.
- Iteration Limits (Max/Min): Estes controlam o número de iterações permitidas para cada substep. O programa equilibra automaticamente entre permitir mais iterações e reduzir o step size. Os valores por defeito geralmente funcionam bem.
- Convergence Factor: Pode ser utilizada uma sub-relaxação (under-relaxation) da iteração de força, definindo o fator de convergência para um valor muito inferior à unidade (ex: 0,1 a 0,01). Valores mais pequenos aumentam a estabilidade da iteração, mas requerem mais iterações para atingir a convergência.
Compreender a Target-Force Iteration
A Target-Force Iteration é um processo especial que equilibra as forças no seu modelo antes do início do step de análise principal. É mais útil quando uma estrutura começa num estado altamente não-equilibrado (unbalanced).
Como Funciona
Quando aplica cargas do tipo " target force " numa análise estática não-linear, o software utiliza um processo iterativo para alcançar esses alvos.
- Análise Inicial: O software aplica cargas de teste (trial loads) aos elementos aos quais atribuiu uma target force e executa uma análise não-linear completa (ou uma única fase da mesma).
- Comparar e Calcular o Erro: Após a análise, compara as forças reais nesses elementos com as suas target force. Em seguida, calcula um erro médio.
- Repetir: Se o erro for maior do que a tolerância de convergência que definiu, o software calcula uma nova carga de teste e executa a análise inteira novamente.
Este processo repete-se até que o erro esteja dentro da tolerância ou o número máximo de iterações seja atingido.
Parâmetros de Controlo
Pode controlar este processo usando as seguintes definições no Caso de Carga estático não-linear:
- Relative Convergence Tolerance: Define o nível de erro aceitável para as target force. Como estes são alvos desejados e não necessários para o equilíbrio, um valor maior como 0,01 a 0,10 é frequentemente recomendado.
- Maximum Number of Iterations: Define um limite para o número de vezes que o processo pode ser executado. É uma boa prática começar com um valor moderado, como 5 a 10, e aumentá-lo se necessário.
- Acceleration Factor: Este fator ajusta a carga para a próxima iteração.
- Use um valor maior que 1 se a convergência for lenta (ex: ao empurrar contra uma estrutura flexível).
- Use um valor menor que 1 se o processo for instável e o erro estiver a crescer ou a oscilar.
- Continue on Failure: Pode optar por continuar a análise principal mesmo que as target force não sejam perfeitamente alcançadas. Isto é útil porque atingir o alvo exato pode nem sempre ser possível ou necessário.
Dicas e Melhores Práticas
- Seja Realista: Não pode forçar cargas arbitrárias numa estrutura simples e estaticamente determinada (isostática), como uma treliça básica. O processo funciona melhor em estruturas rígidas e complexas (hiperestáticas) com múltiplos apoios.
- Espere Convergência Lenta: A convergência pode ser lenta quando os elementos estão ligados a apoios muito flexíveis ou trabalham contra outros elementos com target force.
- Casos de Carga Separados: Para melhores resultados, tente aplicar cargas de target force num Caso de Carga ou fase de construção separados de outros tipos de cargas, sempre que possível.